1
試合前準備
ロボットと動作プログラムは 事前に準備 し、競技場入場後すぐ試合を開始できるようにします。
Competition Rules
種目ごとの試合方式、装備、競技場、進行手順、採点基準をひとつのページで確認できます。
Move & Touch Technic
Move & Touch Technic のゲーム概要と参加資格を確認します。
RULE 02
テクニックロボットを操作し、バトルスイッチの四方側面中央にある赤外線センサーを認識させた後、最後のミッションに該当するバトルスイッチのボタンを先に押した選手が勝利するゲームです。
Move & Touch Technic
試合前の準備、テクニック組立基準、電池、ホイール制限、数量制限を確認します。
ロボットと動作プログラムは 事前に準備 し、競技場入場後すぐ試合を開始できるようにします。
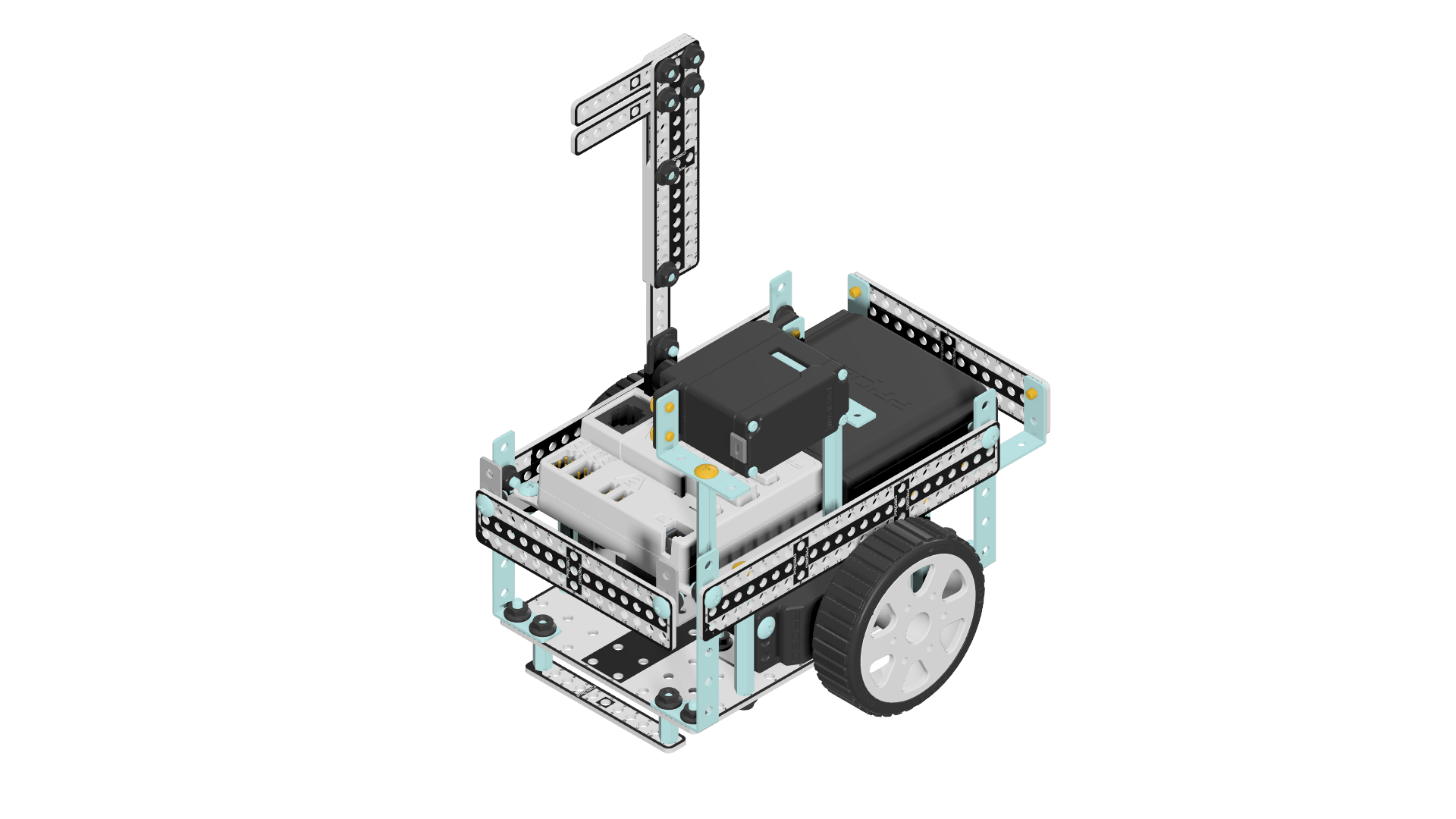
ロボットは Probo Technique パーツを中心に 組み立てます。
AA電池ケースのみ使用可能 で、充電式電池は使用できません。電池検査は各試合前に全選手を対象に実施し、規定外電池は失格となります。電池が見やすいように組み立ててください。
※ 使用可能電池規格 : 1.5V 以下の電池に限り、アルカリ NEO 電池(白色 AA)とアルカリ FairMan(AA)

ロボット組立時は Probo Technique 標準ホイールのみ使用可能 で、その他のホイールは制限されます。
※ 使用禁止 : メカナムホイール、オフロードホイール、モンスターホイール
モーター、ホイール、コントローラー数量は次の基準に従います。





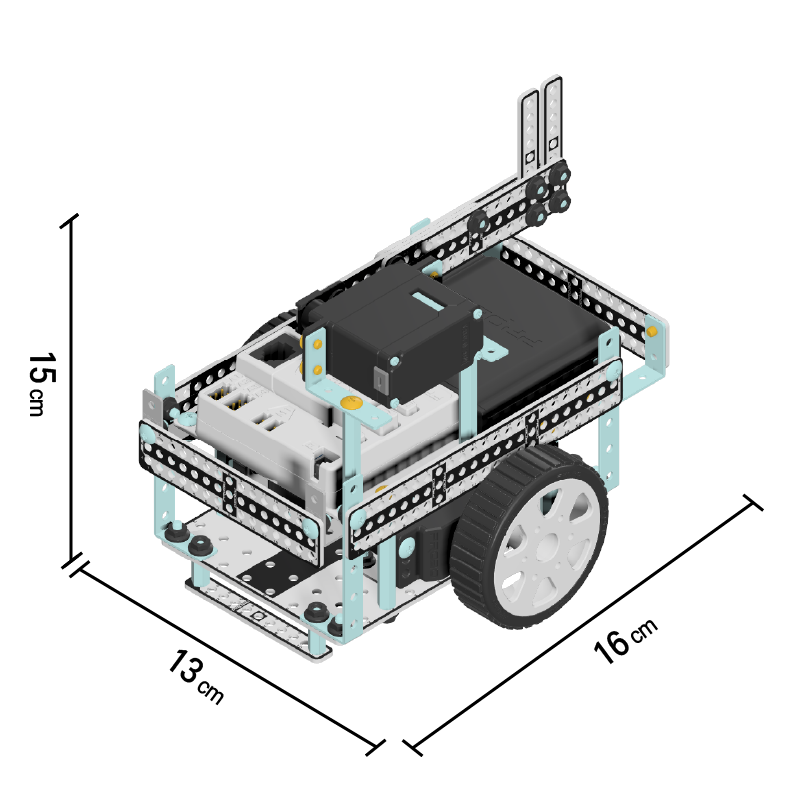
Move & Touch Technic
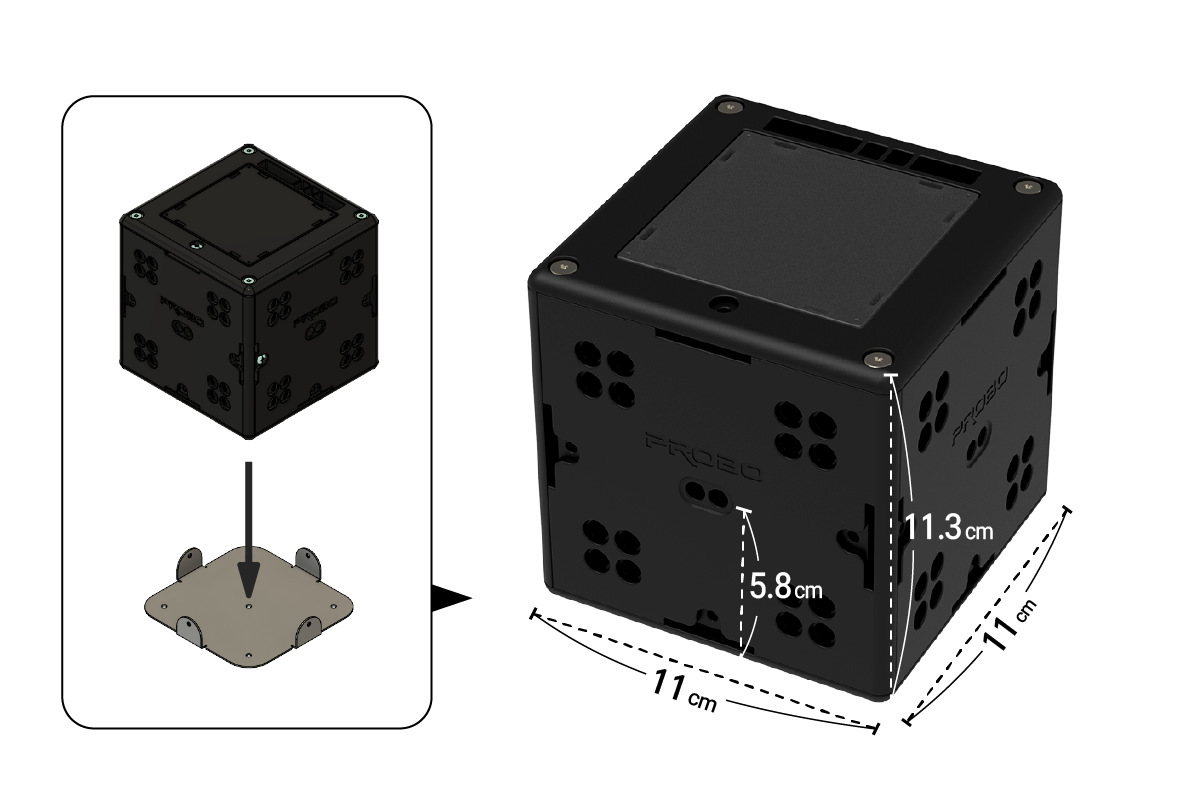
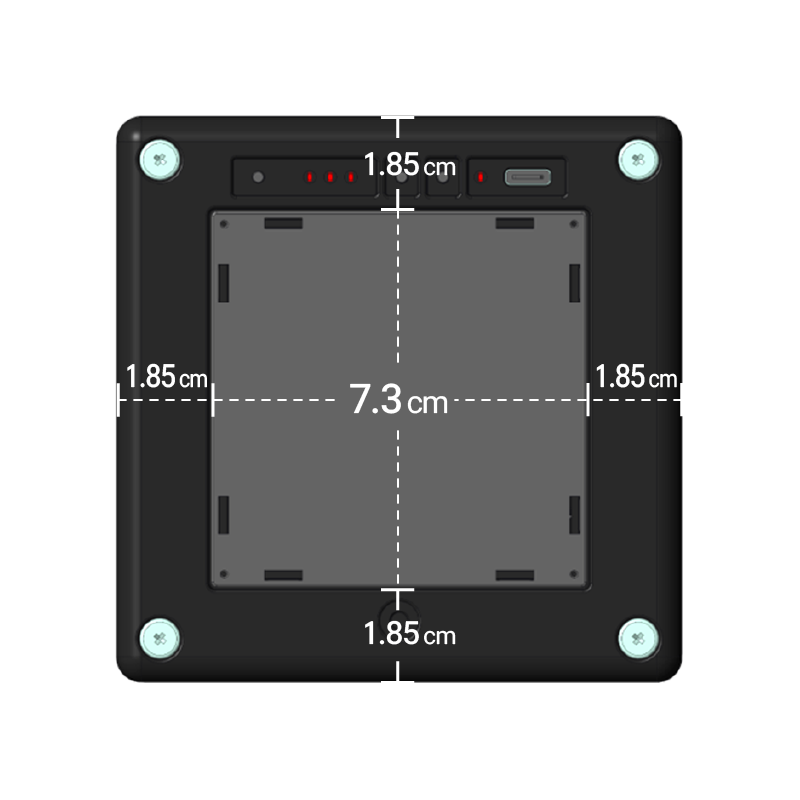
ロボットサイズ、測定基準、試合中の変形許容範囲を確認します。
このファームウェアはFlowでのみ実行されます。GULCでは実行されません。
Flowを開くMove & Touch Technic
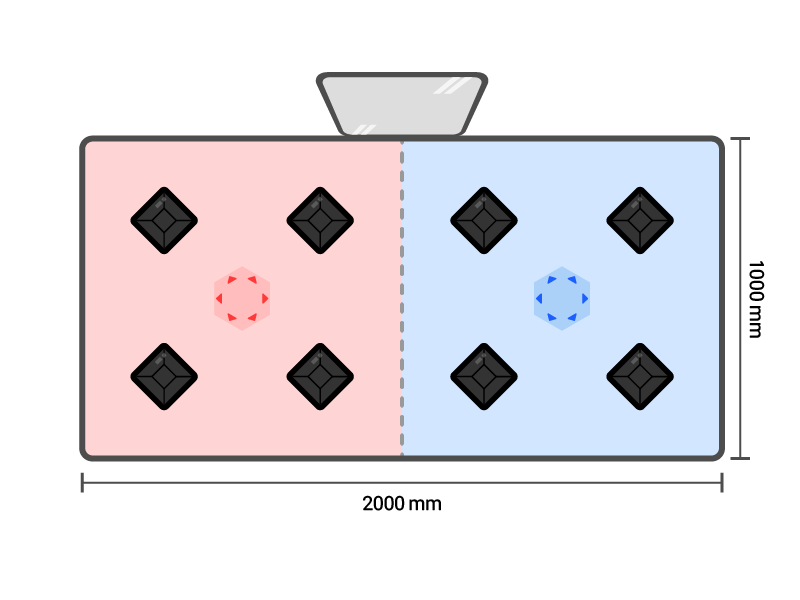
競技場の基本規格と現場変動案内を確認します。

 内側のエリアで自由な向きに配置できます。
内側のエリアで自由な向きに配置できます。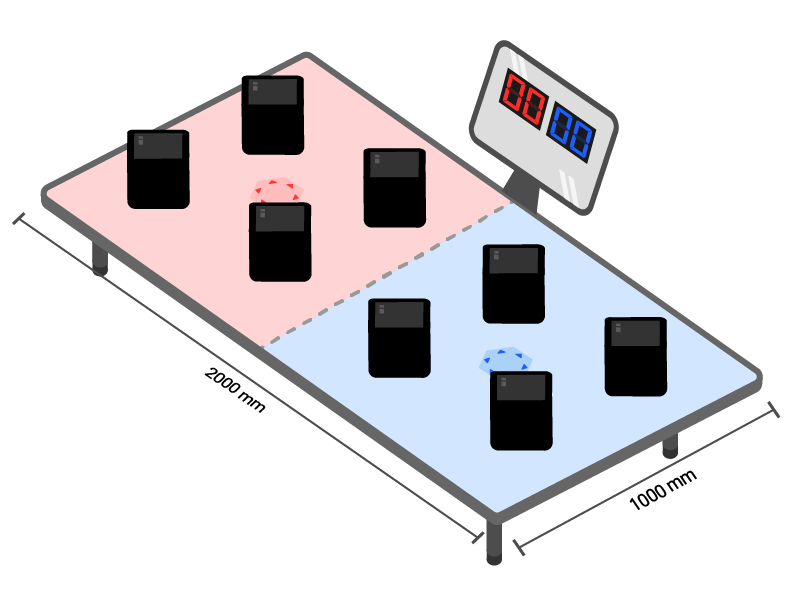
Move & Touch Technic
センサー認識および再試合基準を確認します。

Move & Touch Technic
赤外線方向灯、ミッション完了灯、勝点基準を段階別に確認します。
Move & Touch Technic
赤外線センサー認識とロボットフレーム組立基準を確認します。
Notice Detail
ロボットがバトルスイッチの赤外線センサーにしっかり認識されるよう、ロボット四方側面のフレームをセンサーの高さに合わせて組み立てる必要があります。
Move & Touch Technic
参加人数ごとの対戦フローと受賞人数を確認します。
12人基準の対戦フローと受賞人数を確認します。
18人基準の対戦フローと受賞人数を確認します。
24人基準の対戦フローと受賞人数を確認します。

36人基準の対戦フローと受賞人数を確認します。